
")

 In diesem Teilprojekt der Verbundprojektes For3D der Bayerischen Forschungsstiftung sollen neue Verfahren zur Änderungsanalyse in Punktwolken entwickelt werden. Dabei sollen einerseits Punktwolken von verschieden Sensoren oder Auswerteverfahren fusioniert und zudem mit Aufnahmen zu unterschiedlichen Zeitpunkten verglichen werden. Dazu ist zunächst ein automatisches und hochgenaues Zuordnungsverfahren zu entwickeln. Unter Berücksichtigung der sensortypischen und oberflächen- bzw. materialabgängigen Aufnahmegenauigkeiten sind Änderungen zu detektieren, die auf eine Änderung der 3D-Szene und nicht auf Ungenauigkeiten bei der Generierung der Punktwolke zurückzuführen sind. Als Anwendungsgebiet sollen hauptsächlich Fragestellungen in Zusammenhang mit der Erfassung von Flussläufen durch Lasertopobathymetrie bearbeitet werden. Topobathymetrische Laserscanningdatensätze bilden sowohl Objekte oberhalb der Wasseroberfläche (Topographie) als auch unterhalb der Wasseroberfläche bzw. in der Wassersäule ab (Bathymetrie). Das Fehlen von festen und geometrisch eindeutigen Strukturen (z.B. Gebäude, Straßen) in dieser Messumgebung (Gewässerräume) erschwert nicht nur den Streifenabgleich innerhalb eines Datensatzes sondern vor allem die Referenzierung verschiedener zeitlicher Perioden der gleichen Messumgebung.
In diesem Teilprojekt der Verbundprojektes For3D der Bayerischen Forschungsstiftung sollen neue Verfahren zur Änderungsanalyse in Punktwolken entwickelt werden. Dabei sollen einerseits Punktwolken von verschieden Sensoren oder Auswerteverfahren fusioniert und zudem mit Aufnahmen zu unterschiedlichen Zeitpunkten verglichen werden. Dazu ist zunächst ein automatisches und hochgenaues Zuordnungsverfahren zu entwickeln. Unter Berücksichtigung der sensortypischen und oberflächen- bzw. materialabgängigen Aufnahmegenauigkeiten sind Änderungen zu detektieren, die auf eine Änderung der 3D-Szene und nicht auf Ungenauigkeiten bei der Generierung der Punktwolke zurückzuführen sind. Als Anwendungsgebiet sollen hauptsächlich Fragestellungen in Zusammenhang mit der Erfassung von Flussläufen durch Lasertopobathymetrie bearbeitet werden. Topobathymetrische Laserscanningdatensätze bilden sowohl Objekte oberhalb der Wasseroberfläche (Topographie) als auch unterhalb der Wasseroberfläche bzw. in der Wassersäule ab (Bathymetrie). Das Fehlen von festen und geometrisch eindeutigen Strukturen (z.B. Gebäude, Straßen) in dieser Messumgebung (Gewässerräume) erschwert nicht nur den Streifenabgleich innerhalb eines Datensatzes sondern vor allem die Referenzierung verschiedener zeitlicher Perioden der gleichen Messumgebung.
Das Arbeitsprogramm ist im Wesentlichen an die Prozesskette der Datenverarbeitung angelehnt. Hier steht am Beginn die Datenerhebung, die sich in die Aufgaben der Planung der Messkampagne, Einbau und Kalibrierung der Sensorik und die eigentliche Durchführung der Messkampagne gliedert. Die Änderungsdetektion kann in 3 grobe Teilschritte untergliedert werden. Zuerst ist eine Fusion der verschiedenen Daten für jeweils einen Aufnahmezeitpunkt notwendig. Dies betrifft verschiedene Datenquellen, z.B. LiDAR Punktwolken und Punktwolken aus Bilddaten, also auch Daten aus verschiedenen Blickwinkeln, z.B. Punktwolken, die aus in Schrägsicht aufgezeichneten LiDAR- oder Bilddaten erstellt wurden und bei denen verschiedene Blickrichtungen zu kombinieren sind. Zum zweiten ist eine Koregistrierung (Matching) der verschiedenen Datensätze notwendig. Dabei sind sowohl verschiedene Eingangsdaten derselben Aufnahmezeitpunkten zu koregistrieren, wie auch Datensätze zu verschiedenen Aufnahmezeitpunkten, um einen spätere Änderungsdetektion zu ermöglichen. Ein solches Matching kann je nach Daten auf verschiedenen Verfahren beruhen. Schließlich folgt die eigentliche Änderungsdetektion, die wiederum sowohl auf Daten eines Sensors zu verschiedenen Zeiten wie auch auf den fusionierten Daten verschiedener Sensoren basieren kann.
Im Rahmen der Verarbeitung großer Datenmengen in einem Voxelraum besteht eine enge Kooperation zur TUM Informatik, Lehrstuhl Professor Westermann.
Als Industriepartner im Projekt beteiligen sich Steinbacher Consult, NavVis und ESG.
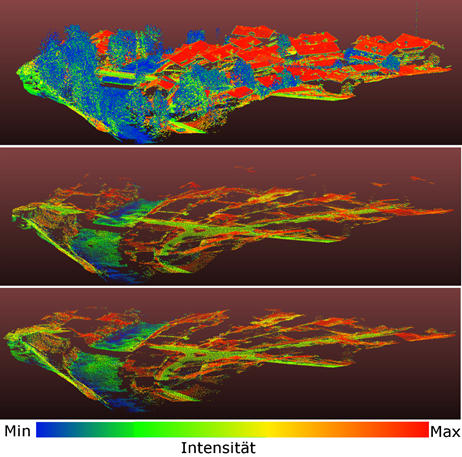
Für die Befliegungen konnte die Firma AHM - Airborne Hydro Mapping aus Innsbruch gewonnen werden. Sie verfügt über einen zusammen mit der Firma Riegl entwickelten experimentellen grüner Laser, mit dem vom Flugzeug aus 3D Punktwolken auch von der Wasseroberfläche und dem Grund flacher Gewässer erstellt werden können. Hierdurch wird die Erstellung eines durchgängigen 3D Geländemodells ermöglicht. Für die geplanten Befliegungen eines 17 km langen Bereichs der Mangfall zwischen Tegernsee und der Autobahn A8 wurde daher ein Anftrag in einer Höhe von 70.000 € an AHM vergeben. Die so aufgenommenen Daten stehen anschließend allen Partnern im Verbundprojekt zur Verfügung.
Mehr Details zum Verbundprojekt For3D finden Sie auf der Homepage des Verbunds.