
")

TUM City Campus - MLS test dataset ![]()
A cooperative benchmark dataset of TUM-PF, Munich, and Fraunhofer IOSB, Ettlingen, Germany.
The test area "TUM City Campus" is located in Munich, Germany, (48.1493° N, 11.5685° E) and covers an area of about 29000 m2. It shows the main entrance of TUM and sections of the streets: Arcisstr., Theresienstr., Luisenstr., and Gabelsbergerstr. in the city district Maxvorstadt.
TUM-MLS-2016: Mobile laser scanning - test data (2016) TUM MLS 1
The test dataset TUM MLS 1 was acquired by mobile laser scanning (MLS) using a van (testbed MODISSA) from Fraunhofer Institute of Optronics, System Technologies and Image Exploitation (IOSB) on April 18th 2016, see [http://s.fhg.de/mls1]. Two Velodyne HDL-64E were mounted at an angle of 35 degrees on the front roof of a vehicle (van). The point cloud was acquired by more than 8000 scans (rotations of the scanner head) of each of the two laser scanners. The video clip below shows a rendered visualization of parts of these data and their acquisition, where each point is gray-value coded according to the echo amplitude measured by the laser scanners. Direct georeferencing was performed using an Applanix POS LV inertial navigation system. In addition to the coordinates of measured 3D points, the data set contains the respective sensor positions. The dataset contains 1.735.045.976 3D points in 17756 .pcd files (15 minutes) and requires 62 GB of storage. For a quick look, a small portion of the data (3 seconds) can be downloaded as [.zip file]. Details of the data format are explained in an included [readme file].

A longer version can be seen here: [YouTube]
TUM-MLS-2016: Mobile laser scanning - test data (2016) TUM MLS 1 - labeled
For training and evaluation the availability of a corresponding labeled point cloud is very important. Parts of the test area "TUM City Campus" have been manually labeled by Photogrammetry and Remote Sensing at Technische Universität München (TUM-PF) based on the point cloud TUM MLS 1. The 3D data have been assigned to the following classes: Unlabeled (0), Artificial Terrain (1), Natural Terrain (2), High Vegetation (3), Low Vegetation (4), Building (5), Hardscape (6), Artefact (7), and Vehicle (8). The video clip below shows parts of these data where each point is color coded according to class. The according metadata can be found in subfolder ./Labels on the FTP server. See an [online visualization] for an impression of the labeled 3D data.

A longer version can be seen here: [YouTube]
A detailed description of the dataset TUM-MLS-2016 can be found here [PDF]
Besides, an additional reference dataset with the instance-level segmented objects will come soon, with 817 objects of eight classes mentioned above labeled and segmented.
TUM-MLS-2018: Mobile laser scanning - test data (2018) TUM MLS 2
On December 19th 2018, Fraunhofer IOSB again acquired mobile laser scanning (MLS) data at the test site "TUM City Campus", see [http://s.fhg.de/mls2]. The acquisition resulted in more than 10.500 scans (rotations of the scanner head) of each of the two Velodyne HDL-64E laser scanners The dataset contains more than 2 billion 3D points in 21170 .pcd files (17 minutes) and requires 73 GB of storage. A basic fine-registration has been performed (loop-closures and registration to "MLS 1 - TUM City Campus" 2016). The results of this registration step are per-scan translation vectors which can be found in a separate folder. A more sophisticated fine-registration may be necessary for tasks like change detection, i.e., these translation vectors should be replaced by better fine-registration results if necessary. In case you already have access to the first data set, you only need to replace the "1" in the user name by "2". The respective password is the same. In combination with the previous data set "TUM City Campus" (2016), methods for automatic 3D change detection can be developed and tested. For a quick look, a small portion of the data (3 seconds) can be downloaded as [.zip file].

A longer version can be seen here: [YouTube]
TUM-MLS-2018: Mobile laser scanning - test data (2018) TUM MLS 2 - labeled
For training and evaluation the availability of a corresponding labeled point cloud is very important. Parts of the test area "TUM City Campus" have been manually labeled by Photogrammetry and Remote Sensing at Technische Universität München (TUM-PF) based on the point cloud TUM MLS 2. The 3D data have been assigned to the following classes: Unlabeled (0), Artificial Terrain (1), Natural Terrain (2), High Vegetation (3), Low Vegetation (4), Building (5), Hardscape (6), Artefact (7), and Vehicle (8). The video clip below shows parts of these data where each point is color coded according to class. The according metadata can be found in subfolder ./Labels on the FTP server.

A longer version can be seen here: [YouTube]
Mobile laser scanning - test data (2016, 2018)
In combination of "TUM City Campus" (2018) with the previous data set "TUM City Campus" (2016), methods for automatic 3D change detection can be developed and tested.
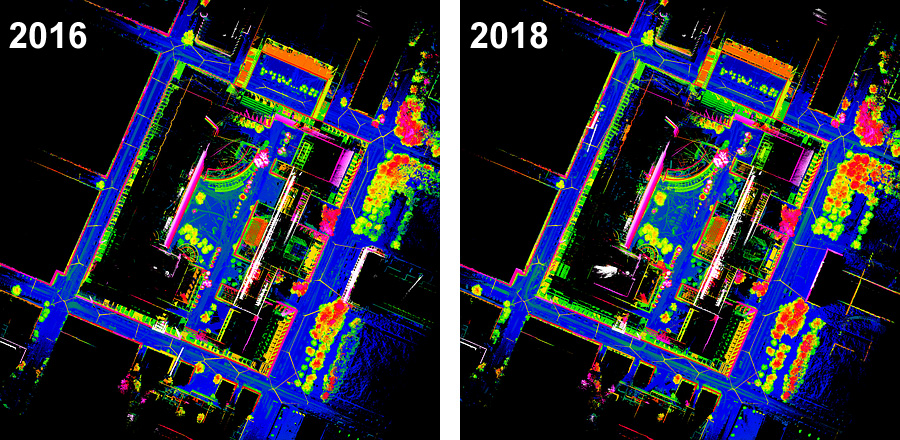
Top views of the data sets "MLS 1" (2016) and "MLS 2" (2018). Color-coding according to height.
Data acquisition
Please contact [Prof. Uwe Stilla or Dr. Yusheng Xu] (http://www.pf.bgu.tum.de/sta.html) of TUM-PF or Marcus Hebel (
Copyright
The original MLS dataset is copyrighted by Fraunhofer IOSB and it is made available under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License (CC BY-NC-SA 4.0).
Reference:
Please refer the following publications, if the reference datasets are used in your work:
Zhu J, Gehrung J, Huang R, Borgmann B, Sun Z, Hoegner L, Hebel M, Xu Y, Stilla U (2020) TUM-MLS-2016: An annotated mobile LiDAR dataset of the TUM city campus for semantic point-cloud interpretation in urban areas. Remote Sensing, 12(11): 1875
[doi: 10.3390/rs12111875][PDF]
Gehrung J, Hebel M, Arens M, Stilla U (2017) An approach to extract moving objects from MLS data using a volumetric background representation. In: ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, IV-1/W1: 107–114
[doi: 10.5194/isprs-annals-IV-1-W1-107-2017][PDF]
TUM City Campus - ALS test dataset ![]()
TUM City Campus - TIR test dataset![]()
An infrared (TIR) image sequence is available for test purposes. It was recorded with an uncooled microbolometer, which was mounted crosswise to the driving direction. The images of the sequence are provided as 16-bit TIFFs with lossless compression (LZW). In total, the sequence consists of 18907 single frames (7.6 GB), which are available via the FTP server of IOSB. A small portion of the data (3 seconds) can be downloaded as [.zip] file


Abenberg - ALS test dataset ![]()
A cooperative benchmark dataset of TUM-PF, Munich, and Fraunhofer-IOSB, Ettlingen, Germany.
In April 2008, the test site Abenberg (49.2416° N, 10.9636° E) was covered by four ALS strips in a cross pattern, resulting in an accumulated point cloud which includes 5,400,000 points with an average point density of 16 pts/m². The first figure shows a rendered visualization of these data, where each point is gray-value coded according to the echo amplitude, which is derived from full waveform analysis of the backscattered pulse. The test site was scanned again in August 2009, using the same sensors and a similar setting (second figure). In addition to the coordinates of 3D points, the data sets contain the sensor positions, local normal directions and results of pre-classification. These multi-temporal multi-view ALS data are well suited for the development and evaluation of change detection methods, and for the investigation of other applications of ALS data, e.g., city modeling.
The data are commonly available for algorithm development, testing and evaluation. Details of the data format are explained in an included [ readme file ].

Download: Abenberg data 2008 [111 MB]

Download: Abenberg data 2009 [147 MB]
Copyright
The original ALS dataset is copyrighted by Fraunhofer IOSB and it is made available under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License (CC BY-NC-SA 4.0).
Reference:
Please refer the following publications, if the reference datasets are used in your work:
Hebel M, Arens M, Stilla U (2013) Change detection in urban areas by object-based analysis and on-the-fly comparison of multi-view ALS data. ISPRS Journal of Photogrammetry and Remote Sensing 86 (2013): 52–64
[doi:10.1016/j.isprsjprs.2013.09.005] [PDF]